At TradeWraps, our Vehicle Wrap AND Upfitting company in Manassas, VA, specializes in getting your business graphics on cars and trucks that create engaging mobile advertising for your business. We also offer Upfitting, so you can get your graphics, and your locks, shelves, and storage solutions, all at the same place! With our proven process, we can deliver the kind of quick and effective results that your fleet needs. We’re your one stop shop for Vehicle Wraps and Upfitting!
We’ve teamed up with Ranger Design to offer a one-stop solution for shelves, drawers, storage, and vehicle wraps. No need to coordinate with multiple vendors – streamline the process and enhance your fleet all at one place, TradeWraps! Based in Manassas, VA.
Smart business owners use the spaces available to them to interact with existing and potential customers in meaningful ways. Two often-overlooked, high-impact areas for messages are your windows and floors. Custom floor graphics and window graphics create effective, affordable opportunities to engage with your audience.
Your walls are large, blank canvasses with countless possibilities to showcase your business and attract more customers. With a carefully planned and executed wall mural, you can take full advantage of this unique chunk of real estate. Let TradeWraps help with this project!
Architectural wraps offer an affordable way to brand, customize or simply redecorate your space. Plus, they’re easy to change when you’re ready for a facelift. They help make your environment clean, comfortable and inviting while portraying your company personality.
Vehicle Wraps have the BEST ROI on Advertising in 2024.
Excellent Return on Investment
Fleet graphics don't cost you per impression, like ads typically do. It's almost like free advertising.
Reach Consumers Where They Are
Studies show that on average, Americans spend 20 hours a week on the road. Often they'll come across wrapped trucks, vans, and cars on the way to wherever their destination is.
Attention-Grabbing Graphics
When parked at a job-site, potential clients won't need to shop around, they see the bold wrapped vehicle and immediately know who to call!
$3 in Sales
From $1 Spent
Daily Impressions
0
More ROI than Other Forms of Advertising
0x
Of People Call From Seeing Wrapped Vehicles
0%
Play Video
Save Time
At One Shop
One-Stop Shop
TradeWraps does Upfitting!
At TradeWraps, we know how tough it can be to schedule your new vehicle with both your upfitter, and your wrapper, that’s why we’ve partnered with Ranger Design and Legend to give you the same quality service, at one place!
We're beyond impressed with Ranger Design's extensive commercial vehicle storage and shelving solutions for all different trades, plumbing, HVAC, electrical, you name it! They even had a 3D tool we use to fully customize your upfitting!
Legend not only offers comfortable and quiet flooring, a convenient side step, and insulated wall liners, but they also are the creator of the Securilock Slamlock, the only unbreakable and unbreachable van lock on the market right now!
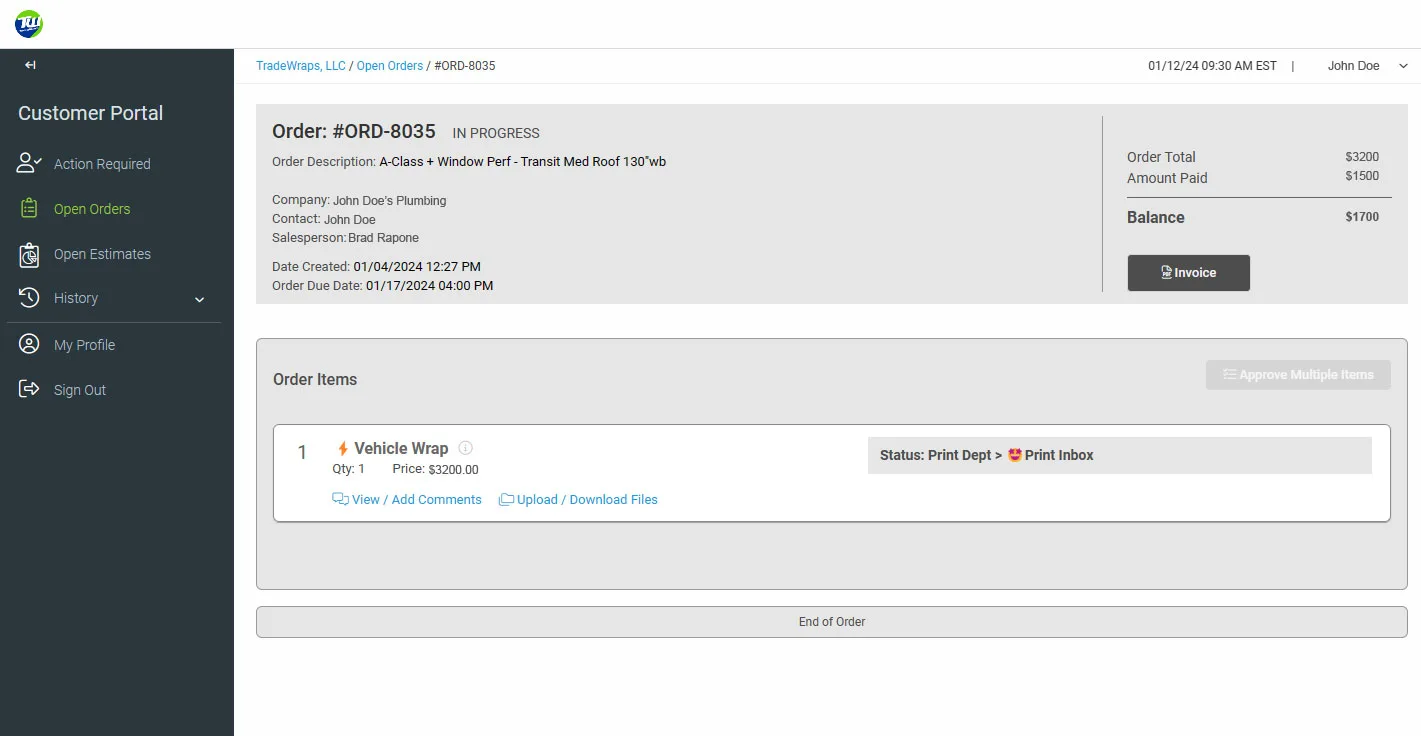
Always have access to your order progress and remaining balances!
Job Status
No need to call
Data-Driven Insights
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Ut elit tellus, luctus nec ullamcorper mattis, pulvinar dapibus leo.
Viral-Worthy Content Creation
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Ut elit tellus, luctus nec ullamcorper mattis, pulvinar dapibus leo.
Influencer Collaboration Made Easy
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Ut elit tellus, luctus nec ullamcorper mattis, pulvinar dapibus leo.
How it works
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Ut elit tellus, luctus nec ullamcorper mattis, pulvinar dapibus leo.
Strategy Consultation and Goal Setting
Augue ante tortor mi purus aenean etiam. Nam suspendisse nunc taciti augue euismod risus. Porttitor aenean felis tristique volutpat natoque in phasellus tortor quam vestibulum eleifend.
Augue ante tortor mi purus aenean etiam. Nam suspendisse nunc taciti augue euismod risus. Porttitor aenean felis tristique volutpat natoque in phasellus tortor quam vestibulum eleifend.
Augue ante tortor mi purus aenean etiam. Nam suspendisse nunc taciti augue euismod risus. Porttitor aenean felis tristique volutpat natoque in phasellus tortor quam vestibulum eleifend.
“We track our marketing efforts every day and receive 14 to 16 calls per month from new customers that said they saw one of our brightly colored trucks in their neighborhood. Great return on your investment. Vehicle wraps are the best advertisement you can do for a service truck. Small investment and big return. They are billboards.”
Jim SteinleAtomic Plumbing, President
“Your attention to detail and professionalism are the reasons we have had 7 vehicles wrapped by you including our latest – a 20ft box truck that announces to everyone that we are Culligan and darn proud of it.” - D.J. Shannahan, President Sharp Water Culligan
D.J. ShannahanSharp Water Culligan, President
"We bought four new trucks this year, I tried a local sign shop, their graphics were excellent but the wrap was less than on the first truck. I gave them another chance on the second truck and even expressed how important it was to get #2 100%. Well #2 was just as bad, lots of imperfections all over. Needless to say we we found trade Wraps and are 100% satisfied. Local sign shops do not poses the professionalism that Trade Wraps does. We “HIGHLY RECOMMEND THEM”"
Kevin PooleTRITON Defense, COO
"I had a great overall experience with Trade Wraps from start to finish. I want to spotlight James Sigmon and his team for going above and beyond with making sure my needs were met. I will definitely be using trade wraps in the future and will recommend them to others."
Tyriece WalkerSmooth Plumbing, Owner
"My name is Calvin Parker I am the owner of Elevation Athletics. My experience with TradeWraps has been phenomenal. Great customer service. The designer was amazing understanding and took my dream and put it on my van. It has been a huge success for my business as a start up, I would highly recommend TradeWraps for your business, Get ready trade wrap I need two more vans wrapped to get ready for this amazing journey, many blessings and success for your service of business."
Calvin ParkerHead Coach, Elevation Athletics
Why Choose Us
Optimize your company's fleet for greater impact.
TradeWraps is second to none when it comes to design, quality, speed and customer service. From the initial consultation to the finished product, we have a proven process and will walk you through it—every step of the way. The end result is a top quality wrap that will dazzle beyond your wildest expectations.
Design
Effective wrapping requires a compelling design that captivates attention and conveys clear messages. Our skilled designers excel in understanding your preferences and expectations, ensuring a successful outcome in both printing and installation.
Quality
A TradeWraps, we utilize advanced latex printing and reliable Avery wrap films to ensure top-notch quality. Unlike others who compromise with subpar products and unqualified installers, we remain dedicated to our process, guaranteeing that every wrap is executed with excellence, minimizing the risk of damage to your vehicles.
Speed
We’re keenly aware that your vehicles are a major source of revenue. We will work closely with you to make sure your vehicles are wrapped and back on the road as quickly as possible.
Customer Service
Our customer service representatives are determined to make sure you have the best experience possible with TradeWraps. They are friendly, knowledgeable and accessible. They will answer all of your questions, provide a quote and even schedule your installation dates.